Utilisation d'un code de
calcul d'aérodynamique bidimensionnelle instationnaire
Simulation
du comportement instationnaire d'un profil de pale d'hélicoptère et
jugement de l'influence de la
compressibilité
1.
Description
succincte du fonctionnement de l’hélicoptère.
2.
Description
du phénomène instationnaire du rotor
3.
Nécessité
du calcul en instationnaire.
4.
Comparaison
simulation numérique / essai en soufflerie.
5.
Conclusion:
Utilité et limites de la simulation numérique.
Introduction :
La
simulation numérique trouve sa place dans l‘élaboration d’un profil de pale du
fait du caractère instationnaire de certains cas de vol. L’écoulement est
toujours régi par les équations de Navier Stokes mais on ne sait plus les
résoudre, il est donc nécessaire d’utiliser un modèle mathématique tenant
compte de certaines hypothèses pour pouvoir décrire le comportement de
l’écoulement autour de la pale. Cette simulation par le calcul n’est en aucun
cas suffisante, elle vient en complément des résultats obtenus par les essais
menés en soufflerie.
Notre
étude nous a amené à utiliser un code de calcul
![]() 1. Description
succincte du fonctionnement de l’hélicoptère.
1. Description
succincte du fonctionnement de l’hélicoptère.
Description
de l’hélicoptère
L’hélicoptère
classique est composé de deux rotors :
-
le
rotor principal, le plus gros, est celui qui soulève l’hélicoptère et le fait
avancer et tourner.
-
Le rotor secondaire,
plus petit, est désaxé par rapport au rotor principal : son seul but est
de créer un moment s’opposant à celui créé par la rotation du rotor principal,
qui tend à faire tourner l’hélicoptère.
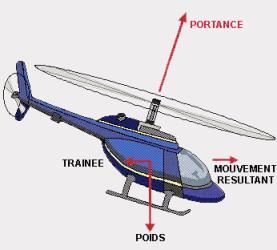
En
vol stationnaire, la force de portance, créée par le rotor principal, est
dirigée vers le haut, s’opposant directement au poids de l’appareil. Pour
avancer, il suffit donc d’incliner vers l’avant cette force, donc de pencher
l’hélicoptère en avant. De même, il peut reculer en penchant en arrière. Pour
pencher dans un sens ou dans l’autre, il est nécessaire de créer un moment
perpendiculaire à l’axe de rotation du rotor. Ce moment est obtenu en modifiant
l’angle d’incidence des pales au cours de leur rotation.
De
même, pour faire monter ou descendre l’appareil, on modifie la portance du
rotor ; là encore, c’est l’angle d’incidence qui modifie la portance. Cette fois, on
ajoute une valeur d’incidence indépendante de la rotation.
Le
rotor principal est le plus complexe à étudier ; ses pales sont fixées sur
le rotor par une liaison à trois degrés de liberté en rotation, pour éviter
l’apparition de moments fléchissants trop élevés à cet endroit. En
fonctionnement, les pales s’orientent de manière à former un cône. De plus,
pour agir sur l’angle d’incidence, elles tournent sur elles même. On constate
ainsi que cette liaison complexe permet en fait aux pales de se déplacer
légèrement. Nous étudierons ici uniquement l’influence de l’angle d’incidence
(réglable par un système de bielles, alors que les autres rotations ne sont pas
contrôlées).

Bilan
de puissance
Le moteur entraîne le rotor principal et le rotor arrière au travers de la boîte de transmission principale et de la boîte de transmission auxiliaire. La puissance transmise par la boîte de transmission principale est appelée puissance du rotor principal (Prp) et celle transmise par la boîte de transmission auxiliaire, puissance du rotor arrière (Pra). La puissance Pra consommée par le rotor arrière est fonction de la puissance consommée par le rotor principal : de l’ordre de 12 % de Prp en vol stationnaire et de 7% de Prp en vol d’avancement (c’est à dire à partir de 30 km/h). La puissance due aux pertes mécaniques (boites de transmission principalement) représente 5% de la puissance envoyée aux rotors principal et arrière. On constate donc que le rotor principal consomme le plus de puissance (83%) ce qui est logique puisque c’est lui qui porte et fait avancer l’hélicoptère.
Dans des conditions de vol normales, la vitesse de l’hélicoptère est de l’ordre de 250 km/h. Un ordre de grandeur de la vitesse de rotation de la pale : v=350 tr/min environ.
![]() 2.
Description du phénomène instationnaire du rotor
2.
Description du phénomène instationnaire du rotor
Commençons par préciser ce que l’on entend par cas stationnaire et instationnaire.
Lorsque les paramètres tels que la vitesse varient dans le temps, on parle de conditions instationnaires et de décrochage dynamique.
Pour
une pale d’hélicoptère en vol d’avancement stabilisé, les paramètres
d’incidence et de vitesse ne sont pas constants. Ils varient de manière
périodique avec la rotation du rotor, nous nous trouvons donc dans le cas
instationnaire.
(voir graphe du cercle inverse)
Deux
phénomènes limitent la grande vitesse et apparaissent sur le rotor principal
-
Le
décrochage en pale reculante
-
La
compressibilité en pale avançante
Décrochage
en pale reculante :
Dans
le cas d’un rotor articulé au centre, il est nécessaire que le moment
aérodynamique autour de l’axe d’avancement soit constant au cours de la
rotation.
Le
niveau de portance de la pale avançante devra donc être le même que celui de la
pale reculante
L’écart
de vitesse étant très grand entre ces 2 positions
-
En
pale reculante les incidences seront très importantes et la vitesse relative de
la pale faible (le cercle d’inversion limite cette vitesse)
-
En
pale avançante, les incidences seront faibles et la vitesse relative de la pale
élevée
Dans
ce but :
- On augmente la vitesse périphérique mais la divergence de traînée en pale avançante est préjudiciable.
-
On
augmente la corde au détriment d’une désadaptation du rotor dans les autres cas
de vol (traînée importante en vol stationnaire et à faible vitesse)
L’incidence
de la pale est donc le seule paramètre que l’on peut faire évoluer pour ajuster
la portance et le moment aérodynamique.
Un
phénomène important du fonctionnement aérodynamique d’un rotor est le
décrochage : valeur limite de l’incidence des pales au-delà de laquelle la
portance décroît rapidement.
Lorsque
le décrochage apparaît, la traînée de profil est accrue et des vibrations
importantes peuvent aller jusqu’à une perte partielle du contrôle du rotor.
Il
se produit le même phénomène à partir d’un certain nombre de Mach, les polaires
Cz locales nécessaires sur la pale reculante dépassent rapidement les limites
des profils classiques. Il s’ensuit sur le rotor une augmentation
catastrophique de la puissance.
L’angle
d’incidence et le nombre de Mach sont ainsi les deux paramètres que nous allons
devoir faire évoluer pour étudier le comportement de la pale.
En
pratique, on impose à la pale reculante de ne pas dépasser une incidence de 13°
en extrémité.
De la même façon, il est impossible de dépasser la vitesse du son puisque la pale reculante est toujours à une vitesse inférieure ; la pale avançante franchirait donc le mur du son à chaque tour, ce qui créerait une onde de choc et la dégraderait rapidement.
La modélisation du profil de la pale doit tenir compte des conditions instationnaires et doit prendre en compte ces paramètres.
Le
cas stationnaire correspond aux équations de Navier Stokes, et il est possible
de résoudre numériquement les équations différentielles. Le cas instationnaire
répond également aux équations de Navier Stokes mais le problème est rendu plus
complexe à cause du nombre de paramètres mis en jeu beaucoup plus important
(une vingtaine). On ne peut pas résoudre ces équations, on utilise donc une
méthode de calcul semi-empirique c’est-à-dire mettant en œuvre une
représentation mathématique nécessitant la détermination de coefficients
expérimentaux fonctions de l’angle d’incidence et du nombre de Mach.
Le
code de calcul reprend ces coefficients et permet de les tester pour des
conditions de vol données (vitesse et angle d’incidence notamment).
![]() 3.
Nécessité du calcul en instationnaire
3.
Nécessité du calcul en instationnaire
Les conditions de calcul imposées par le caractère instationnaire amènent à conduire simultanément :
-
La
validation des méthodes numériques
-
Les
modélisations et les adaptations de ces méthodes pour pouvoir déterminer et
analyser les écoulements instationnaires rencontrer dans la réalité
-
Les
comparaisons avec des résultats de mesure et de visualisation expérimentaux
afin de compléter et orienter les futures expérimentations.
C’est
une mise au point permanente par expérience.
Au cours de notre étude, nous nous sommes plus particulièrement intéressé à l’utilisation d’un code de calcul fonctionnant sur la base d’un modèle mathématique semi empirique programmé en Fortran, langage utilisé notamment par Eurocopter.
Ce programme repose sur une hypothèse principale :
Une
petite variation de l’incidence a dans le domaine non
linéaire implique une petite variation de Cz et l’on va considérer cette petite
variation comme linéaire. On décompose ainsi le domaine non linéaire en une
succession de petits domaines linéaires.
dCz = k.da
Le
code utilise le modèle mathématique suivant pour lequel nous ne ferons pas la
démonstration tout simplement parce qu’il fait appel à des outils mathématiques
que nous maîtrisons mal.

Cz1
domaine linéaire
Cz2
domaine non linéaire
DCz hypothèse à partir de la
polaire stationnaire
Le
plus important est de comprendre que le code agit sur les coefficients sans
dimension l et k
l : amplitude réduite de
variation de vitesse
k :
fréquence réduite
![]()
![]()
Où
A est l’amplitude donné à la pale en translation en soufflerie et c la longueur
de la corde

Mesurer
et caractériser le comportement aérodynamique global et local du profil étudié
V=V¥*(1+lcos(wt))
a=a0+Da*cos(wt) Da amplitude du tangage
Sur
les hélicoptères actuels l=0.4 et Czm<0.7
Il
faut diminuer Czm sur le rotor
Courbes
tracées à l’aide du code de calcul :
·
(a)
Dans un premier temps nous avons voulu comparer le Cz obtenu en régime stationnaire au Cz obtenu en régime
instationnaire par le code de calcul pour des valeurs du nombre de Mach allant
de 0.3 à 0.7 sur le profil OA207 qui équipe les hélicoptères Puma et les super
Puma en bout de pale.
On remarque qu’à Mach 0.3, on retrouve la même pente
en stationnaire et en instationnaire pour la montée du Cz en fonction de
l’angle d’incidence.
La première chose que l’on observe sur ces courbes,
c’est l’apparition d’un phénomène d’hystérésis sur les courbes instationnaires.
La portance de la pale diminue dangereusement après avoir atteint le Cz max,
c’est le décrochage.
Ensuite en augmentant le nombre de Mach, on voit que le Cz maxi reste le même mais que le Cz mini diminue de 0.60 pour Mach 0.3 jusqu’à 0 pour Mach 0.7, l’incidence variant toujours entre 6 et 18°.
·
(b)
Nous avons ensuite comparé la portance pour deux couples de valeurs de l et k.
Si l’on considère que la vitesse Vmoy et w sont des paramètres liés aux conditions de
vol, on s’attachera uniquement à déterminer la corde et le paramètre A,
amplitude de translation de la pale ; ces deux paramètres sont
proportionnels à l et k.
Ainsi on remarque que l’amplitude de variation de Cz
est plus faible pour le couple l=0,25 et k=0,05 mais il
apparaît aussi une petite boucle à aire négative, quelque soit la vitesse
considérée (de Mach 0,3 à Mach 0,7). Cette aire négative est le signe d’une
instabilité ; toutefois, ici, l’aire est petite, ce qui signifie que
l’instabilité est de très courte durée et n’a pas le temps de se développer.
Si l’on calcule l’aire totale de la courbe il faut s’assurer que celle ci est positive, car elle reflète la portance d’une pale durant un tour de rotor.
·
(c)
Une comparaison des Cm pour plusieurs nombres de Mach nous montre que le
décrochage est d’autant plus important que le nombre de Mach est élevé. Ceci
souligne la limitation en vitesse inhérente à l’hélicoptère.
·
(d)
Nous avons dans un quatrième temps comparé le moment Cm pour deux couples de
valeurs de l et k :
Le moment Cm est le moment créé par la portance,
calculé à 25% de la longueur de la corde. On constate que pour le couple l=0,25 et k=0,05 la courbe est majoritairement
négative, alors que pour le couple l=0,30 et k=0,08 on atteint
une valeur maximale de 0,15. La seule contrainte de Cm est d’avoir une aire
positive, ce qui est ici le cas pour les deux couples de valeurs, puisqu’il n’y
a aucune boucle. Soulignons aussi que ces courbes ont été effectuées avec la
polaire du profil SA131 alors que toutes les autres utilisent celle du profil OA207.
Ceci ne change en aucun cas la théorie de l’étude, mais seulement les valeurs
obtenues.
·
(e)
Un autre relevé compare les valeurs de Cm obtenues pour différentes vitesses
d’avancement : on constate alors l’apparition de grandes boucles à aire
négative, (pour un sens de parcours de la courbe qui est le sens horaire) au
point que l’intégrale complète peut devenir négative (si la –les- boucle est
plus grande que la boucle principale). physiquement, cela signifie que c’est
l’air environnant qui fournit de l’énergie à la pale ; ceci est absurde
dans la réalité puisque l’air est au repos, sauf si l’on considère que
l’énergie est communiquée à l’air par la pale précédente !
Dans ce cas, bien que le programme ne le signale pas, on est hors domaine de
simulation, car la pale est détruite sous l’effet des vibrations. Ce cas est
volontairement exagéré pour que les courbes soient représentatives : en
effet, les angles d’incidence choisis sont de 12° ±10° alors que dans la réalité, on se limite à
une plage de 2° à 12°.
·
Ce
type de relevé (Cm pour plusieurs valeurs de vitesse) a été calculé pour deux
valeurs de l (0,6 et 0,25) et deux
valeurs de k (0,12 et 0,05). Une première constatation, lors de l’exécution du
programme, était que pour les grandes vitesses (Mach 0,7 ou 0,8), le code était
incapable de donner un résultat pour Cm : ceci est du au fait que les
données entrées (à savoir la polaire) sont limitées et pour certains
coefficients on dépasse ces limites à
grande vitesse ; ainsi le programme, ne trouvant pas de correspondance sur
la polaire, renvoie un message d’erreur.
Une deuxième constatation est que l’aire totale devient manifestement négative.
Pour nous en assurer, nous avons calculé l’aire de quelques courbes à l’aide
d’un Macintosh (Excel se montrant incapable d’un tel calcul), pour le couple l=0,6 et k=0,05 à Mach 0,3 l’aire est
positive, elle vaut 0,56. Alors que pour le même couple et à Mach 0,6, l’aire
est négative (-0,02). Ces valeurs de l et k sont donc à proscrire,
il convient donc de calculer la corde et les paramètres de vitesse en
conséquence. Ainsi, on déterminera les valeurs de l et k optimales selon les conditions de vol
que l’on s’est imposé.
![]() 4.
Comparaison simulation numérique / essai en soufflerie.
4.
Comparaison simulation numérique / essai en soufflerie.
Dans
un premier temps, les essais en soufflerie viennent pour étalonner les
coefficients des calculs numériques. Ces coefficients jouent un rôle majeur
dans l’efficacité de prédiction du modèle. On procède à les expériences sur des
modèles qui nous intéressent et on cherche à retrouver ces résultats
numériquement.
Le
code de calcul permet dans un premier temps de déterminer le couple de
coefficients optimisés l et k et, dans un deuxième
temps, de mieux cibler les essais à réaliser en soufflerie.
Dans
la pratique, il existe des programmes sources desquels on extrait la partie qui
nous intéresse en fonction de ce qu’on veut savoir, la portance , la traînée,
le moment… Ces programmes sont appelés code, ils utilisent des polaires
stationnaires qui ont été obtenues expérimentalement par des essais en soufflerie.
Parfois, comme pour le code que nous avons utilisé, il suffit de donner les
conditions d’utilisation (vitesse d’avance, c’est à dire vitesse à l’infini
amont, ainsi que vitesse de rotation du rotor) mais pour des codes plus
compliqués, on utilise un mailleur, un programme qui permet de recréer l’objet
à modéliser (DAO) et de lui appliquer des conditions limites, portant sur la
vitesse d’écoulement ou la pression par exemple.
Le
programme utilisé lors de cette simulation est de 650 lignes environs, mais il
est issu d’un algorithme plus complexe de plus de 9000 lignes. Le langage
utilisé est le Fortran, qui est un très vieux langage qui a peu évolué. En
particulier il y a eu des incompatibilités de transfert entre les PC et les
Macintosh. Il est remarquable que, malgré les différents langages apparut
depuis, (Turbo pascal, C++…), le Fortran est toujours le plus utilisé en
entreprise et dans la recherche.
Le
code de calcul est donc tout d’abord déterminé par les essais en soufflerie, de
manière empirique. Passé cette première étape, la simulation permet de faire
beaucoup plus d’essai à moindre coût et moins de temps. De plus, elle permet
aussi de simuler des hélicoptères grandeur nature, alors qu’on ne peut étudier
en soufflerie que des modèles réduits pour des raisons techniques évidentes.